Wiki.inG
Fahrerassistenzsysteme
Wikifehler: Name 'Klassifikation' kann nicht doppelt verwendet werden
Inhaltsübersicht
2. Fahrerassistenzsysteme [Bearbeiten]
2.1.1. Umfeldsensorik
2.1.2. Sensor für Kurskrümmung
2.1.3. Auswertung
2.1.4. Aktorik
2.1.5. Probleme und Grenzen
2.1.6. Bilanz
3. Einparkassistenz [Bearbeiten]
3.1.1. Klassifikation
4. Spurwechselassistent [Bearbeiten]
4.1.1. Sensorik
4.1.2. Rückmeldung an den Fahrer
Einleitung [Bearbeiten]
Bei Fahrerassistenzsystemen handelt es sich um elektronische oder mechatronische (früher auch rein mechanische) Systeme, die das Führen eines Kraftfahrzeugs vereinfachen sollen. Sie tragen so dazu bei, Sicherheit und Komfort beim Autofahren zu erhöhen.
Fahrerassistenzsysteme [Bearbeiten]
Abstandsregeltempomat
Um die Geschwindigkeit des Fahrzeugs automatisch konstant zu halten, gibt es für Kraftfahrzeuge eine automatische Geschwindigkeitsregelung, bekannt unter dem Namen „Tempomat“. Der Fahrzeugführer gibt dem System die Wunschgeschwindigkeit $$ v_{set} $$ vor und muss sich nicht weiter darum kümmern, die Fahrzeuggeschwindigkeit beizubehalten. Sobald jedoch ein mit geringerer Geschwindigkeit vorausfahrendes Fahrzeug eingeholt wird, muss der Fahrzeugführer eingreifen, um eine Kollision zu verhindern: falls möglich, kann er das vorausfahrende Fahrzeug überholen, andernfalls muss er die Geschwindigkeit seines eigenen Fahrzeugs verringern.
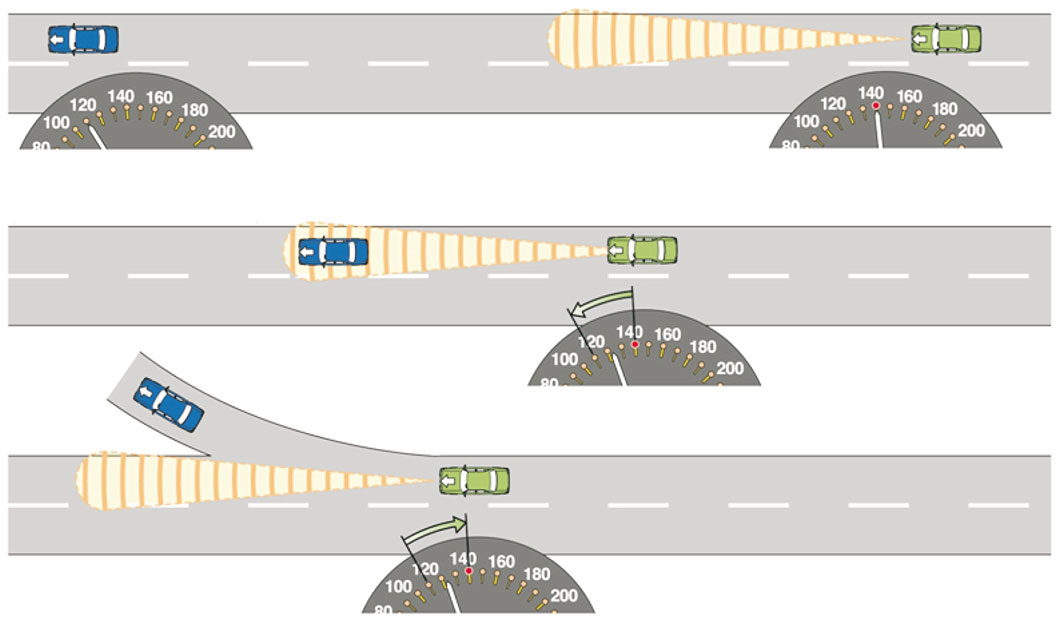
Es wäre darum wünschenswert, den Tempomaten so zu erweitern, dass vorausfahrende Fahrzeuge erkannt werden können und gegebenenfalls in einen zweiten Betriebsmodus, genannt „Folgeregelung“, zu schalten. In diesem Modus soll die Geschwindigkeit des eigenen Fahrzeugs angepasst werden, um dem vorausfahrenden Fahrzeug mit einem gewünschten Zeitabstand $$ \tau_{set} $$ zu folgen. Verlässt das vorausfahrende Fahrzeug die Fahrspur, soll das System wieder in die Geschwindigkeitsregelung schalten und das eigene Auto auf die zuvor vom Fahrzeugführer eingestellte Wunschgeschwindigkeit beschleunigen. Das Funktionsprinzip wird von der nebenstehenden Abbildung veranschaulicht.
Ein solches Fahrerassistenzsystem wird „Abstandsregeltempomat“ genannt. Im Englischen hat sich der Begriff „adaptive cruise control“ eingebürgert, daher die Abkürzung ACC.
In den Normen wird zwischen zwei Klassen von Abstandsregeltempomaten unterschieden. Die ältere Norm ISO 15622 gibt die Rahmenbedingungen für das sogenannte Standard-ACC vor. Eine dieser Rahmenbedingungen ist, dass die minimale Geschwindigkeit, bei der das System noch funktionieren muss, bei höchstens $$ 5 \frac{m}{s} $$ liegen darf. Die neuere Norm ISO 22179 definiert das Full-Speed-Range ACC, kurz FSRA. Solche Systeme sind in der Lage, das Fahrzeug bis zum Stillstand zu bremsen. Full-Speed-Range ACC-Systeme mit sogenanntem Stop-&-Go-Assistent oder Stauassistent sind darüber hinaus in der Lage, das Fahrzeug automatisch wieder anfahren zu lassen.
Gemäß obigen Ausführungen muss das System also einerseits in der Lage sein, den Bereich vor dem Fahrzeug zu überwachen, um Hindernisse detektieren zu können und deren Abstand und Relativgeschwindigkeit zu messen; andererseits muss das System Komponenten besitzen, die ein Beschleunigen und Verzögern des Fahrzeugs ermöglichen.
Umfeldsensorik
Um vorausfahrende Fahrzeuge detektieren zu können, benötigt das System einen Umfeldsensor, der den Bereich vor dem Fahrzeug überwacht.
Anforderungen
Der Sensor muss folgende Anforderungen bzw. Aufgaben erfüllen:
- Mehrzielfähigkeit
Da sich im Bereich vor dem Fahrzeug im Allgemeinen mehrere andere Fahrzeuge und auch stehende Objekte aufhalten, muss der Sensor in der Lage sein, diese alle zu erfassen und zwischen ihnen zu unterscheiden.
- Abstandsmessung
Hier kommt es vor allem auf eine hohe Maximalreichweite an, die zu der höchsten einstellbaren Sollgeschwindigkeit $$ v_{set} $$ und der größten Zeitlücke $$ \tau_{set} $$ passt. Die Genauigkeit ist weniger wichtig, da das Regelsystem aus Komfortgründen so ausgelegt wird, dass nur langsam auf Abstandsänderungen reagiert wird.
- Relativgeschwindigkeit
Hier ist die Genauigkeit kritisch, da das Regelsystem so ausgelegt werden muss, dass auf Änderungen in der Relativgeschwindigkeit des vorausfahrenden Fahrzeugs relativ direkt reagiert wird. Die Genauigkeit der Messung der Relativgeschwindigkeit wirkt sich damit direkt auf den Fahrkomfort bei aktiviertem Abstandsregeltempomat aus.
- Lateraler Öffnungswinkel
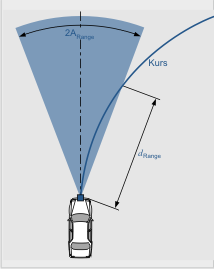
Der laterale Öffnungswinkel gibt den Öffnungswinkel in der Ebene parallel zur Straße an. Er muss groß genug sein für die größte Zeitlücke $$ \tau_{set} $$, die größte Querbeschleunigung $$ a_y $$ und den kleinsten Kurvenradius $$ R_{min} $$.
Für Standard-ACC ist dabei ein lateraler Öffnungswinkel von etwa $$ \pm 8^\circ $$ üblich. Für FSRA-Implementierungen – insbesondere solche mit Stop-&-Go-Assistent – ist es notwendig, Hindernisse im gesamten Bereich vor dem Fahrzeug zuverlässig zu detektieren. Sensoren für FSRA haben darum üblicherweise einen lateralen Öffnungswinkel von $$ \pm 80^\circ $$.
Bei den zur Verfügung stehenden Umfeldsensoren ist es ein Zielkonflikt, gleichzeitig eine hohe Reichweite und einen großen lateralen Öffnungswinkel zu erzielen. Häufig werden für FSRA-Systeme deshalb zwei Sensoren eingesetzt: einer mit hoher Reichweite und nur begrenztem Öffnungswinkel, wie er auch für Standard-ACC verwendet wird, und ein zweiter mit großem Öffnungswinkel, dafür nur begrenzter Reichweite. Diese Kombination von mehreren Sensoren zur Gewinnung von Erkenntnissen über den selben Zustand wird Sensorfusion genannt.
Vergleich verschiedener Sensoren
Für die Umfeldsensorik kommen hauptsächlich Radar-, Lidar- und Kamerasysteme in Frage. Eine Übersicht über wichtige Aspekte dieser Systeme liefert die nachfolgende Tabelle.
| Radar | Lidar | Kamera | ||
| 24 GHz | 77 GHz | |||
|
Entfernungsmessung |
direkt (Phasenverschiebung) |
direkt (Laufzeit) |
indirekt (Differenzbildung) |
|
| Geschwindigkeitsmessung |
direkt (Dopplereffekt) |
indirekt (Differenzbildung) |
indirekt (Differenzbildung) |
|
| Reichweite | + | ++ | o | + |
| Öffnungswinkel | + | –– | ++ | o |
| Laterale Auflösung | + | – | + | ++ |
| Robustheit | + | witterungsabhängig | witterungsabhängig | |
|
Zulassungs- beschränkung |
ermöglicht zusätzliche Funktionen |
|||
| Preis | teuer | günstig | günstig | |
Anmerkungen:
- Das 24-GHz-Radar unterliegt in der EU einer Zulasungsbeschränkung. Es ist nur bis zum 30.06.2013 in Neufahrzeugen zugelassen, bei einer maximalen Fahrzeugdurchdringung von 7 %.
- Zusatzfunktionen, die ein Kamera-System ermöglicht, sind beispielsweise Fahrstreifenerkennung, Schilderkennung und Nachtsichtfunktionen. Kamerasysteme sind bisher allerdings nicht genau genug, um sie als alleinigen Umfeldsensor einzusetzen.
Sensor für Kurskrümmung
Wie später in der Beschreibung der Auswertung dargelegt wird, benötigt ein Abstandsregeltempomat Information über die aktuelle Kurskrümmung. Dafür lassen sich unterschiedliche Sensoren verwenden:
- Lenkradwinkel
- Gierrate
- Querbeschleunigung
- Radgeschwindigkeiten
Diese Sensoren besitzen teils sehr unterschiedliche Vor- und Nachteile. Beispielsweise ist die Berechnung der Kurskrümmung aus der Gierrate sehr robust gegenüber Seitenwind, Straßenquerneigung, Radradius-Toleranzen, allerdings nur mittelmäßig genau und unterliegt einem starken Offsetdrift. Diesen Nachteil hat die Berechnung aus dem Lenkradwinkel nicht, jedoch ist diese Methode anfällig für Seitenwind und Straßenquerneigung, und ungenau bei hohen Geschwindigkeiten. Es ist also wieder notwendig, Daten unterschiedlicher Sensoren zu fusionieren, um die Auswirkungen von einzelnen Nachteilen abzuschwächen.
Günstigerweise ist es so, dass bei aktuellen Fahrzeugen mit ESP-Technik sämtliche oben genannten Sensoren bereits vorhanden sind, da das elektronische Stabilitätsprogramm ihre Daten benötigt. Somit kommen bei der Produktion solcher Systeme keine weiteren Kosten für Hardware hinu.
Allerdings haben die oben genannten Systeme auch alle einen gemeinsamen Nachteil: sie erfassen nur die aktuelle Kurskrümmung, während es für eine absolut zuverlässige Funktion des Systems notwendig ist, die zukünftige Kurskrümmung zu kennen. Ansätze dazu basieren entweder auf Kamerasystemen, oder auf der Nutzung von Kartendaten, die anhand einer GPS-Positionsbestimmung ausgewertet werden.
Auswertung
Die Auswertungseinheit des Abstandsregeltempomaten übernimmt folgende Aufgaben:
- Detektion und Klassifikation von Objekten
- Stehende Objekte
- Entgegenkommende Fahrzeuge
- Fahrzeuge in gleicher Fahrtrichtung
- Fahrzeuge in gleicher Spur
- Fahrzeuge in Nebenspur
- Fahrzeuge, die gerade einen Spurwechsel durchführen
- Falls vorhanden: Auswahl eines geeigneten Ziels und Folgeregelung
- Sonst: Geschwindigkeitsregelung
- Kursprädiktion
Aktorik
Damit der Abstandsregeltempomat das Fahrzeug beschleunigen und verzögern kann, muss das System die Motorleistung steuern können. Um zusätzlich eine angemessen hohe Verzögerung zu erzielen, ist es erforderlich, dass das System zusätzlich Zugriff auf die Bremsanlage erhält.
Günstigerweise ist auch hier die Aktorik aufgrund der ESP-Technik in modernen Fahrzeugen bereits vorhanden. Bei der Entwicklung eines Fahrzeuges muss allerdings darauf geachtet werden, dass sich bei Benutzung der Aktorik für Motorleistung und Bremssystem ein angemessen hoher Fahrkomfort ergeben kann. So müssen sich die Aktoren so feinfühlig stellen lassen können, dass beispielsweise der Ruck, den das Fahrzeug durch Beschleunigungsänderungen erfährt, unter einer gewissen Ruckgrenze liegt. Bei niedrigen Geschwindigkeiten beträgt diese $$ 5 \frac{m}{s^3} $$, bei hohen Geschwindigkeiten $$ 2,5 \frac{m}{s^3} $$.
Probleme und Grenzen
Bei der Entwicklung und der Verwendung eines Abstandsregeltempomaten gibt es ein grundsätzliches Problem zu beachten, welches als Überholdilemma bekannt ist und sich dann, wenn ein vorausfahrendes Fahrzeug detektiert ist, wie folgt äußert:
- Greift das System früh ein, indem es die Geschwindigkeit herabsetzt und in die Folgeregelung schaltet, während der Fahrer sich eigentlich zum Ziel gesetzt hatte, das Fahrzeug zu überholen, wird der Überholvorgang erschwert. Der Fahrer muss dann manuell wieder beschleunigen, um sicher auf die Überholspur zu wechseln.
- Greift das System jedoch spät ein, indem es erst kurz vor dem vorausfahrenden Fahrzeug die Geschwindigkeit herabsetzt und in die Folgeregelung schaltet, während es der Wunsch des Fahrers ist, den Vordermann nicht zu überholen, wird die Folgeregelung erschwert. Das Fahrzeug muss dann recht abrupt herabgebremst werden, was zum einen den Fahrkomfort mindert, zum anderen für nachfolgende Fahrzeuge ein Risiko darstellt und Staubildung begünstigt.
Es gilt also, in der Entwicklungsphase geeignete Grenzwerte für die unterschiedlichen Betriebsmodi zu finden, die gleichzeitig die Sicherheit des Systems sicherstellen und für eine breite Akzeptanz des Systems unter den Kunden sorgen. Möglicherweise lässt sich das Problem lösen, indem die Grenzwerte adaptiv an das Fahrverhalten des einzelnen Fahrers angepasst werden.
Abgesehen von diesem grundsätzlichen Problem lassen sich in den oben beschriebenen Funktionseinheiten Schwierigkeiten identifizieren, von denen zwei angeführt werden sollen: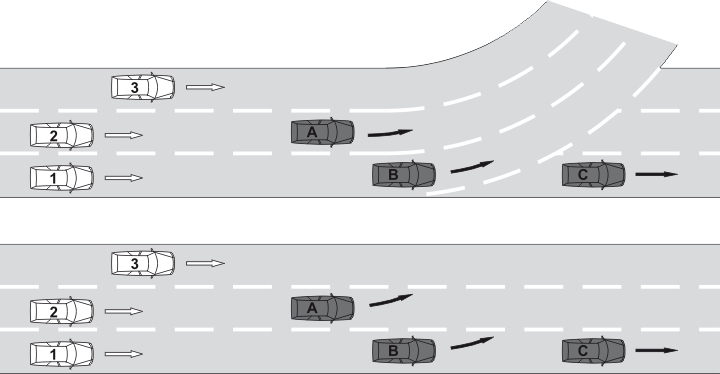
- Wie bereits im Abschnitt zum lateralen Öffnungswinkel des Sensors angeführt, ist es von großer Bedeutung für die Sicherheit eines Stop-&-Go-Assistenten, dass Hindernisse vor dem stehenden Fahrzeug mit absoluter Sicherheit identifiziert werden müssen, bevor das Fahrzeug selbsttätig wieder anfährt. Beispielsweise könnte während des Stillstands ein Fußgänger während einer Rot-Phase den Bereich zwischen dem eigenen und dem vorausfahrenden Fahrzeug betreten haben. Bei fehlerhafter Nicht-Detektion und unaufmerksamem Fahrzeugführer käme es dann höchstwahrscheinlich zum Personenschaden. Aus diesem Grunde sind heutige Stop-&-Go-Assistenten häufig noch mit einer Freigabetaste ausgestattet, die vom Fahrer betätigt werden muss, bevor das Fahrzeug wieder anfährt.
- Ein Beispiel dafür, wie knifflig eine gutes Zusammenspiel von Kursprädiktion und Hindernisklassifizierung ist, liefert das nebenstehende Bild. Obwohl die Sensordaten von Umfeldsensor und Kurskrümmungssensor gleich sind, lassen sie sich aufgrund der Gegebenheiten der Straßenführung unterschiedlich interpretieren. Die genaue Kenntnis der Straßenführung ist dann für eine absolut zuverlässige Funktion des Abstandsregeltempomaten unerlässlich; die Auswertung von Kamerabildern des Straßenverlaufs oder von Kartendaten ist hierfür unerlässlich.
Bilanz
Aus verschiedenen Studien zum Abstandsregeltempomat lässt sich eine durchaus positive Bilanz ziehen:
- Ökonomiegewinn: Unter Verwendung eines Abstandsregeltempomaten lassen sich etwa 10% Kraftstoff einsparen.
- Sicherheitsgewinn: Die Häufigkeit, mit der mit Abstandsregeltempomat ausgestattete Fahrzeuge in schwere Unfälle verwickelt sind, liegt 17% unter dem Durchschnitt.
- Zuverlässigkeit: Trotz der vielen Unsicherheiten, die das Auswertungssystem berücksichtigen muss, kommt es in modernen Systemen nur zu durchschnittlich etwa 1 Fehlentscheidung pro Stunde.
- Nutzerakzeptanz: Die Studienteilnehmer nahmen das zusätzliche Fahrerassistenzsystem durchweg als sinnvolles Feature wahr. Vor allem der Komfortgewinn wurde positiv bewertet.
Beim kommerziellen Erfolg bleibt das System dennoch hinter den Erwartungen zurück. Die Marktdurchdringung liegt bei nur etwa 5 – 10%. Der Grund dafür liegt womöglich im bislang recht hohen Aufpreis für ein solches Fahrerassistenzsystem: bei vielen Fahrzeugherstellern ist ein Abstandsregeltempomat nicht unter 1500 € zu liefern, und häufig kommen noch zusätzliche Kosten – beispielsweise für ein Automatikgetriebe – hinzu.
Einparkassistenz [Bearbeiten]
 Einparken ist eine knifflige und für viele Fahrer mitunter lästige Aufgabe. Insbesondere das Rückwärts-Einparken stellt eine Herausforderung dar, da das Lenkverhalten beim Rückwärtsfahren als unintuitiv gilt und viele moderne Fahrzeuge aufgrund ihres Designs eine schlechte Sicht nach hinten bieten. Eine Vereinfachung des Vorgangs durch ein geeignetes Fahrerassistenzsystem bietet sich an.
Einparken ist eine knifflige und für viele Fahrer mitunter lästige Aufgabe. Insbesondere das Rückwärts-Einparken stellt eine Herausforderung dar, da das Lenkverhalten beim Rückwärtsfahren als unintuitiv gilt und viele moderne Fahrzeuge aufgrund ihres Designs eine schlechte Sicht nach hinten bieten. Eine Vereinfachung des Vorgangs durch ein geeignetes Fahrerassistenzsystem bietet sich an.
Klassifikation
Abhängig vom Grad der Hilfestellung werden Einparkassistenten in eine der vier folgenden Klassen eingeteilt.
- Informierende Systemegeben allein Informationen über die Parklücke oder die Fahrzeugposition in der Lücke Auskunft. Darunter fallen zwei Gruppen von Assistenzsystemen:
- Die Einparkhilfe führt eine Abstandsmessung zum nächsten Hindernis an Fahrzeugfront und/oder -heck durch. Die Informationsausgabe erfolgt häufig entweder über Signaltöne oder über eine optische Anzeige. Als Anforderung an solche Systeme stellen sich eine hohe Robustheit und geringe Gesamtkosten, weswegen häufig die bekannten Ultraschallsensoren benutzt werden.
- Die Parklückenvermessung ermöglicht es, durch Vorbeifahren an einer möglichen Parklücke diese zu vermessen und dem Fahrer Auskunft über die Eignung für sein Fahrzeug zu geben. Anhand der Größe der Parklücke kann diese beispielsweise in eine der Kategorien "ungeeignet", "schwierig" oder "einfach" eingeordnet werden. Wichtig ist bei solchen Systemen, dass keine "Scheinlücken" identifiziert werden, und dass mit einer angemessen hohen Vorbeifahrgeschwindigkeit gearbeitet werden kann.
- Geführte Einparkassistenzsysteme erweitern informierende Einparkassistenzsysteme um die Fähigkeit, dem Fahrer konkrete Anweisungen zu geben, welche Manöver er mit dem Fahrzeug durchführen muss, um es möglichst zielsicher in die Parklücke zu manövrieren. Dazu muss nach einer Vermessung der Parklücke eine geeignete Trajektorie geplant werden, die der Fahrer abfahren kann. Entsprechende Anweisungen werden während des Einparkvorgangs an den Fahrer ausgegeben, während die Fahrzeugposition und -umgebung kontinuierlich überwacht wird.
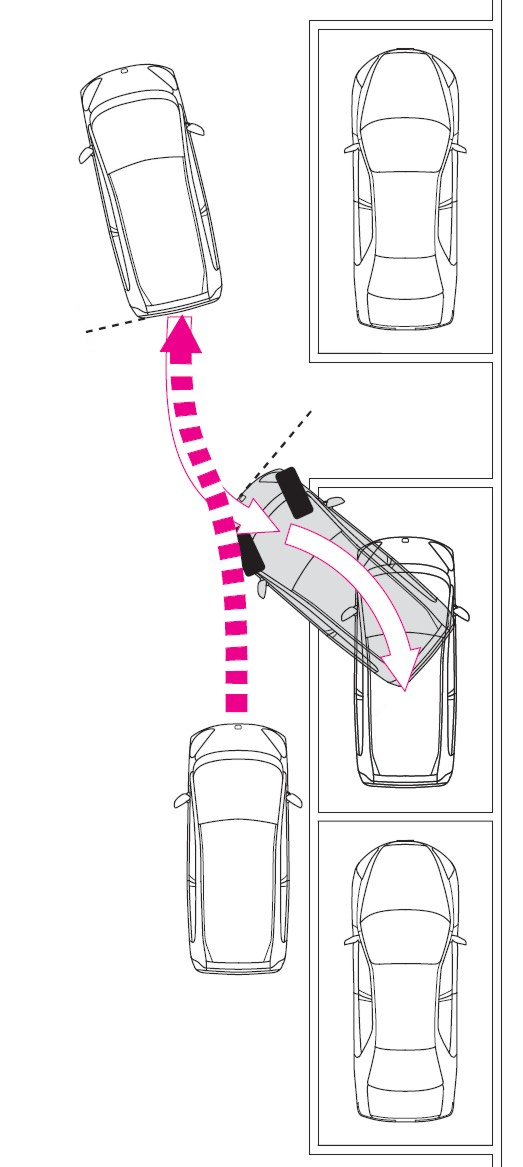
- Semiautomatische Einparkassistenten erweitern die Funktionalität der geführten Einparkassistenz dahingehend, dass ein Teil der notwendigen Fahrzeugbedienschritte durch das Fahrzeug übernommen wird. Gewöhnlich wird die Lenkung durch das Fahrzeug übernommen, sodass der Fahrer nur noch beschleunigen, bremsen und den Gang wechseln muss. Da gerade die Lenkung vom Fahrzeug übernommen wird, kann eine wesentlich kompliziere Trajektorie geplant werden als es bei der geführten Einparkassistenz der Fall ist. Zwar ist zusätzliche Aktorik an der Lenksäule nötig, jedoch ist diese bei modernen Fahrzeugen mit elektronischer Servolenkung bereits vorhanden.
- Beim vollautomatischen Einparken werden sämtliche Handlungen durch das Fahrzeug übernommen. Solche Systeme sind bereits zu einem hohen Grad fertig entwickelt, sind aber noch nicht käuflich erhältlich, da sich die rechtliche Frage stellt, wer bei einem Unfall haftet. Bei einer Häufung von ähnlichen Unfällen könnte es schnell zu einer Flut von Gerichtsverfahren gegen Fahrzeughersteller kommen, wovor diese sich naturgemäß schützen wollen.
Spurwechselassistent [Bearbeiten]
 Beim Spurwechsel handelt es sich um ein Fahrmanöver mit sehr hohem Fehlerpotenzial. Schlechte Sicht, der "tote Winkel", Unachtsamkeit und hohe Geschwindigkeitsunterschiede auf Autobahnen tragen dazu bei. Gerade durch die mitunter hohen Geschwindigkeitsunterschiede auf Autobahnen kommt es immer wieder zu schweren Unfällen. Ein geeignetes Fahrerassistenzsystem kann hier einen wertvollen Beitrag zur Verkehrssicherheit liefern.
Beim Spurwechsel handelt es sich um ein Fahrmanöver mit sehr hohem Fehlerpotenzial. Schlechte Sicht, der "tote Winkel", Unachtsamkeit und hohe Geschwindigkeitsunterschiede auf Autobahnen tragen dazu bei. Gerade durch die mitunter hohen Geschwindigkeitsunterschiede auf Autobahnen kommt es immer wieder zu schweren Unfällen. Ein geeignetes Fahrerassistenzsystem kann hier einen wertvollen Beitrag zur Verkehrssicherheit liefern.
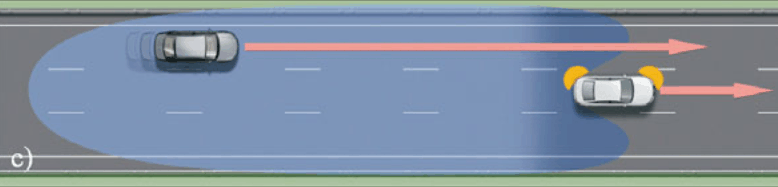
Aufgabe des Spurwechselassistenten ist es, einen Bereich hinter oder seitlich vom Fahrzeug auf andere Fahrzeuge zu überwachen. Erkennt das System ein Fahrzeug, das bei einem Spurwechsel zur Gefahr werden kann, soll eine Rückmeldung an den Fahrer ausgegeben werden.
Klassifikation
Abhängig von dem Bereich, der durch den Spurwechselassistenten überwacht wird, werden solche Systeme in eine von drei Klassen eingeordnet.
- Typ I: Der Sensor überwacht nur den toten Winkel.
- Typ II: DerSensor überwacht nur die Annäherungszone.
- Typ III: DerSensor überwacht beide Bereiche.
Sensorik
Als Sensoren kommen Kameras und Radarsysteme in Frage.
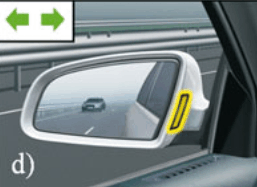
- Kameras haben eine geringe Reichweite. Ihre Funktion ist stark witterungsabhängig. Sie sind deshalb nur zur Überwachung des toten Winkels geeignet und werden dazu häufig in die Seitenspiegel integriert.
- Radarsysteme sind aufgrund ihrer hohen Reichweite auch zur Überwachung des Annäherungsbereiches geeignet. Da Radarwellen Kunststoffe passieren können, können Radarsysteme optisch unauffällig im Stoßfänger untergebracht werden.
Rückmeldung an den Fahrer
 Wird im überwachten Bereich ein Fahrzeug detektiert, das bei einem Spurwechsel eine Gefährdung darstellen kann, wird an den Fahrer eine Rückmeldung ausgegeben, die situationsabhängig unterschiedlich stark ausfallen kann. Eine beispielhafte Implementierung könnte folgendermaßen funktionieren:
Wird im überwachten Bereich ein Fahrzeug detektiert, das bei einem Spurwechsel eine Gefährdung darstellen kann, wird an den Fahrer eine Rückmeldung ausgegeben, die situationsabhängig unterschiedlich stark ausfallen kann. Eine beispielhafte Implementierung könnte folgendermaßen funktionieren:
- Wird ein Fahrzeug detektiert, wird eine wenig aufdringliche Rückmeldung ausgegeben. Dies kann ein unaufdringliches, dauerhaftes optisches Signal sein, das wie im nebenstehenden Bild im Bereich der Außenspiegel angebracht ist, um den Fahrer zu motivieren, in die Richtung des Spiegels zu gucken.
- Ist außerdem die Absicht des Fahrers erkennbar, die Spur zu wechseln – beispielsweise könnte auf die Betätigung des Blinkers reagiert werden – wird das Signal aufdringlicher. So könnte das optische Signal anfangen, zu blinken, oder von einem akustischen Signal unterstützt werden.
Weitere Möglichkeiten, dem Fahrer Rückmeldung zu geben, könnten über ein haptisches Signal erfolgen. So könnte (bei Vorhandensein einer elektronischen Servolenkung) das Lenkmoment erhöht werden, oder es könnte Fahrersitz oder Lenkrad in Vibration versetzt werden.
weitere Fahrerassistenzsysteme
Nachfolgend eine Auswahl weiterer Fahrerassistenzsysteme:
- Antiblockiersystem ABS
- Antriebsschlupfregelung ASR
- Elektronisches Stabilitätsprogramm ESP
- Spurhalteassistent
- Berganfahrhilfe
- Scheibenwischerautomatik
- elektronische Feststellbremse EPB
Literatur [Bearbeiten]
- Winner, Hermann: Handbuch Fahrerassistenzsysteme. Wiesbaden, Vieweg+Teubner Verlag, 2012 (E-Book auf SpringerLink.com)
- Reif, Konrad (Hrsg.): Fahrstabilisierungssysteme und Fahrerassistenzsysteme. Wiesbaden, Vieweg+Teubner Verlag, 2010 (E-Book auf SpringerLink.com)